Wall Painting Robot Project Report
Https Zenodo Org Record 269655 Files Paper 6 20 20issue 1 20 20engg 20full 20paper 20page 2049 56 20 20vani 20mukundan 20sirajudeen 20jan 2017 Pdf
Pdf Design Of An Autonomous Wall Painting Robot
Pdf Agwallp Automatic Guided Wall Painting System
Http Www Ijeter Everscience Org Manuscripts Volume 6 Issue 2 Vol 6 Issue 2 M 09 Pdf
Http Mechanical Srpec Org In Files Project 2016 17 Pdf
Pdf Six Dof Spray Painting Robot Analysis

Tintori replica resample ol18bis photographed in raking light.
Wall painting robot project report.
Http Ijariie Com Adminuploadpdf Automatic Wall Painting Robot Ijariie5422 Pdf

Robotic Spray Painter

Pdf Design And Development Of A Programmable Painting Robot For Houses And Buildings

Sell Building Exterior Wall Painting Machine P Bot Id 24256667 Ec21

Pdf Implementation Of Industrial Robot For Painting Applications
Https Www Ijitee Org Wp Content Uploads Papers V8i8 H6566068819 Pdf

Wall Painter Robot Youtube

Automatic Wall Painting Robot Youtube Wall Painting Wall Painting

Pdf Wall Painting Mechanism

Pdf Automatic Robotic Spray Painting Of Low Volume High Variant Parts

Pdf Paintcopter An Autonomous Uav For Spray Painting On 3d Surfaces
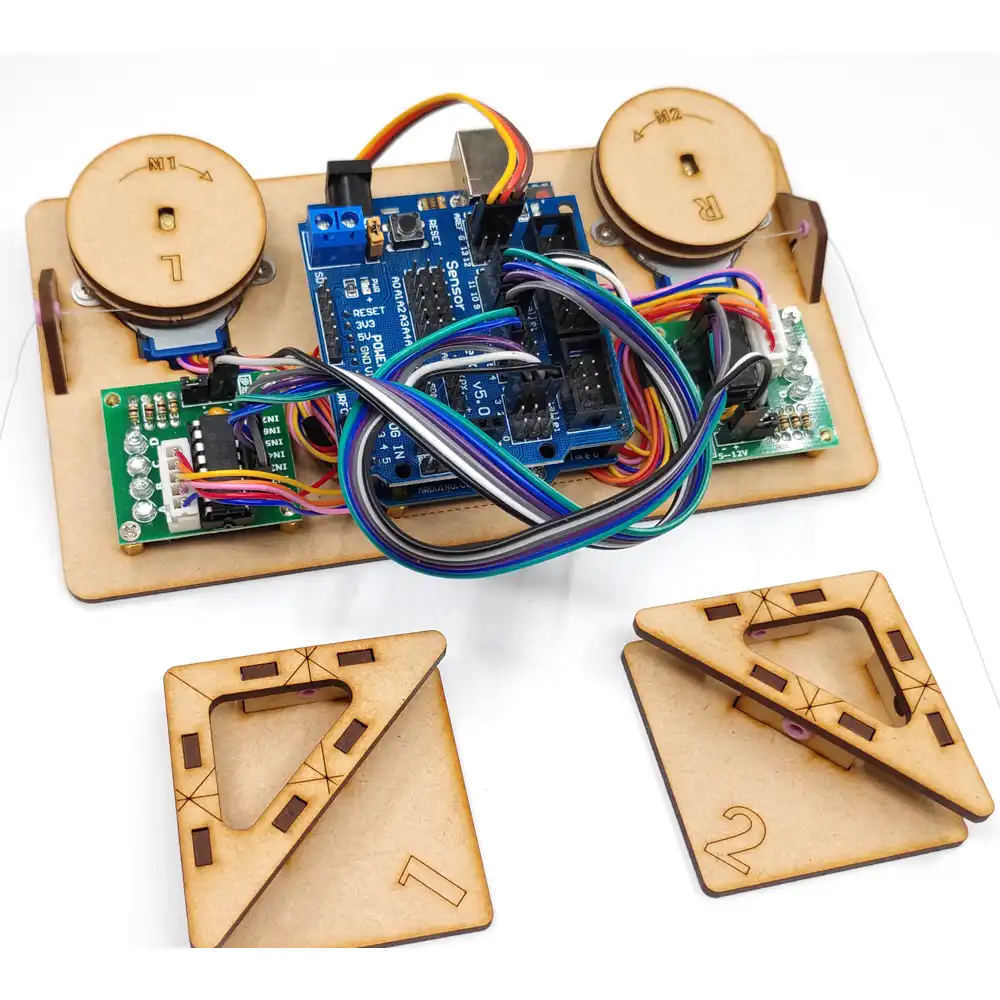
Draw Wall Painting Robot With Cable Plotter Arduino Maker Project Kit Polar Graph With Motor Diy Stem Toy Parts Aliexpress

Automatic Wall Painting Machine Final Year Eee Project Youtube In 2020 Wall Painting Machining Projects Painting

Mist Autonomous Wall Painting Robot Youtube
100 Robotics Projects For Final Year Engineering Students
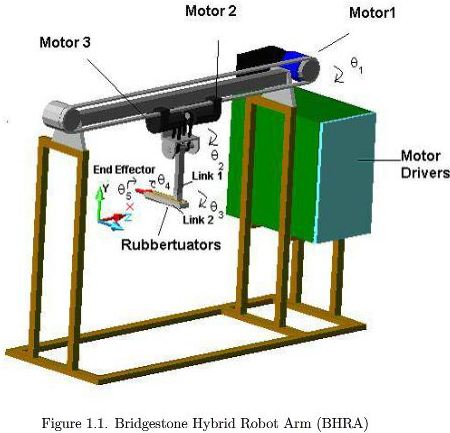
Air Muscle Archives Cyberneticzoo Com

Pdf Robotics In Construction Industry
Report Of Comest On Robotics Ethics Unesco Digital Library
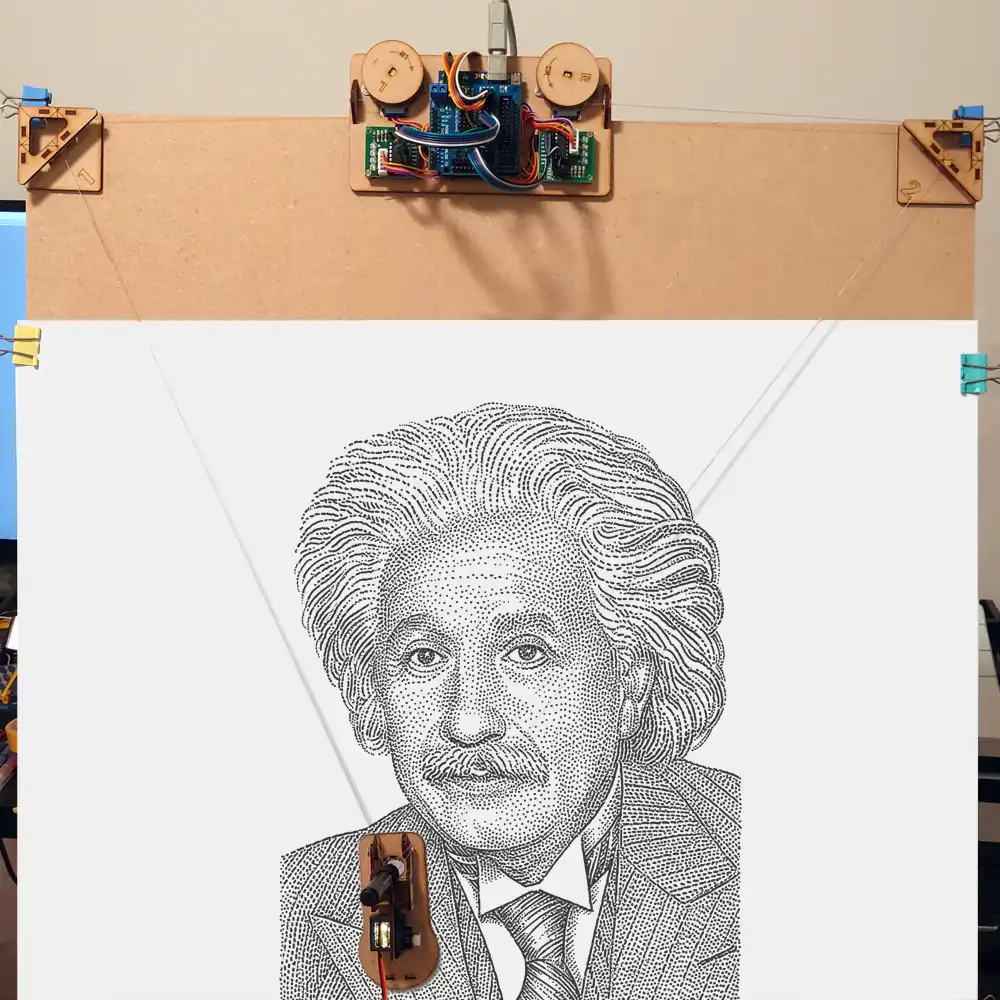
Arduino Wall Draw Painting Robot With Cable Plotter Polar Graph With Stepper Motor Diy Maker Parogram Project Kit Stem Toy Parts Aliexpress

Oil Separating Machine Mechanical Final Year Project Youtube Oils Mechanic Projects

Design Of Automatic Paint Spraying Machine Request Pdf

Puma Light Painting Light Painting Painting Multi Color Led

Agility Robotics On Twitter Delivery Robot Robot Package Delivery

Sand Filter Machine Project By Mechanical Students At Gitm Bilaspur Youtube Machining Projects Mechanical Projects Projects
Source : pinterest.com
